MPU-6050 સાથે કામગીરીને optim પ્ટિમાઇઝ કરવા: સેટઅપ, કેલિબ્રેશન અને એપ્લિકેશનો
2024-04-25
9221
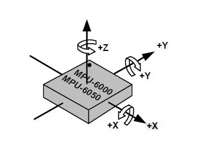
એમપીયુ -6050 વિશ્વનો પ્રથમ સંકલિત 6-અક્ષ મોશન પ્રોસેસિંગ ઘટક છે, જે 3-અક્ષ જીરોસ્કોપ, 3-અક્ષ એક્સેલેરોમીટર અને સ્કેલેબલ ડિજિટલ મોશન પ્રોસેસર (ડીએમપી) ને એકીકૃત કરે છે.તેનો ઉપયોગ કરવાનો હેતુ x, y અને z અક્ષો પર માપવા (જેમ કે ક્વાડકોપ્ટર, બેલેન્સિંગ કાર) ને માપવા માટે object બ્જેક્ટનો ઝોક એંગલ મેળવવાનો છે, એટલે કે, પિચ એંગલ, રોલ એંગલ અને યાવ એંગલ.અમે આઇ 2 સી ઇન્ટરફેસ દ્વારા એમપીયુ -6050 (ત્રણ-અક્ષ પ્રવેગક જાહેરાત મૂલ્ય અને ત્રણ-અક્ષ એંગ્યુલર વેગ એડ મૂલ્ય) ના છ ડેટા વાંચ્યા છે.મુદ્રામાં ફ્યુઝન પ્રોસેસિંગ પછી, પિચ, રોલ અને યાવ એંગલ્સની ગણતરી કરી શકાય છે.માપન મૂલ્યોના દિશાત્મક સંદર્ભ તરીકે, સેન્સર કોઓર્ડિનેટ દિશાની વ્યાખ્યા નીચેની આકૃતિમાં બતાવ્યા પ્રમાણે છે, જે જમણા હાથની સંકલન પ્રણાલીના સિદ્ધાંતને અનુસરે છે (એટલે કે, જમણો અંગૂઠો X- ની સકારાત્મક દિશા તરફ નિર્દેશ કરે છે.અક્ષ, ઇન્ડેક્સ આંગળી વાય-અક્ષની સકારાત્મક દિશા તરફ નિર્દેશ કરે છે, અને મધ્યમ આંગળી ઝેડ-અક્ષની સકારાત્મક દિશા તરફ નિર્દેશ કરે છે).
સૂચિ
તેની સમર્પિત આઇ 2 સી સેન્સર બસ સાથે, એમપીયુ -6050 બાહ્ય 3-અક્ષ હોકાયંત્રથી સીધા ઇનપુટ પ્રાપ્ત કરવામાં સક્ષમ છે, સંપૂર્ણ 9-અક્ષ મોશનફ્યુઝન ™ આઉટપુટ પ્રદાન કરે છે.તે સંયુક્ત જીરોસ્કોપ અને એક્સિલરેટર સમયરેખા વચ્ચેની વિસંગતતાની સમસ્યાને દૂર કરે છે અને મલ્ટિ-કમ્પોનન્ટ સોલ્યુશન્સની તુલનામાં પેકેજિંગ સ્પેસને નોંધપાત્ર રીતે ઘટાડે છે.જ્યારે ત્રણ-અક્ષ મેગ્નેટ ome મીટરથી કનેક્ટ થયેલ છે, ત્યારે એમપીયુ -60x0 તેના મુખ્ય આઇ 2 સી અથવા એસપીઆઈ પોર્ટને સંપૂર્ણ 9-અક્ષ ગતિ ફ્યુઝન આઉટપુટ પ્રદાન કરવામાં સક્ષમ છે (નોંધ લો કે એસપીઆઈ પોર્ટ ફક્ત એમપીયુ -6000 પર ઉપલબ્ધ છે).
વિકલ્પ અને સમકક્ષ
એમપીયુ -6050 ના ઉત્પાદક
એમપીયુ -6050 ના ઉત્પાદક ટીડીકે છે.ટીડીકેના બે સ્થાપકો પછી, ડ Dr .. યોગોરો કાટો અને ટિકી ટિકી, ટોક્યોમાં ફેરાઇટની શોધ કરી, તેઓએ ટોક્યો ડેનકાગાકુ કોગ્યો કે.કે.ની સ્થાપના કરી.1935 માં. વૈશ્વિક ઇલેક્ટ્રોનિક્સ ઉદ્યોગ બ્રાન્ડ તરીકે, ટીડીકે હંમેશાં ઇલેક્ટ્રોનિક કાચા માલ અને ઇલેક્ટ્રોનિક ઘટકોના ક્ષેત્રોમાં પ્રબળ સ્થિતિ જાળવી રાખે છે.ટીડીકેના વ્યાપક અને નવીન-આધારિત ઉત્પાદન પોર્ટફોલિયોમાં સિરામિક કેપેસિટર, એલ્યુમિનિયમ ઇલેક્ટ્રોલાઇટિક કેપેસિટર, ફિલ્મ કેપેસિટર, મેગ્નેટિક પ્રોડક્ટ્સ, હાઇ-ફ્રીક્વન્સી કમ્પોનન્ટ્સ, પીઝોઇલેક્ટ્રિક અને પ્રોટેક્શન ડિવાઇસેસ, જેમ કે સેન્સર અને સેન્સર સિસ્ટમ્સ (જેમ કે સેન્સર અને પ્રેશર જેવા નિષ્ક્રિય ઘટકોનો સમાવેશ થાય છેમેગ્નેટિક અને એમઇએમએસ સેન્સર), વગેરે. વધુમાં, ટીડીકે વીજ પુરવઠો અને energy ર્જા ઉપકરણો, ચુંબકીય હેડ અને અન્ય ઉત્પાદનો પણ પ્રદાન કરે છે.તેની પ્રોડક્ટ બ્રાન્ડ્સમાં ટીડીકે, ઇપીકોસ, ઇનવેન્સન્સ, માઇક્રોનાસ, ટ્રોનિક્સ અને ટીડીકે-લેમ્બડા શામેલ છે.
એમપીયુ -6050 ના આંતરિક બ્લોક આકૃતિ
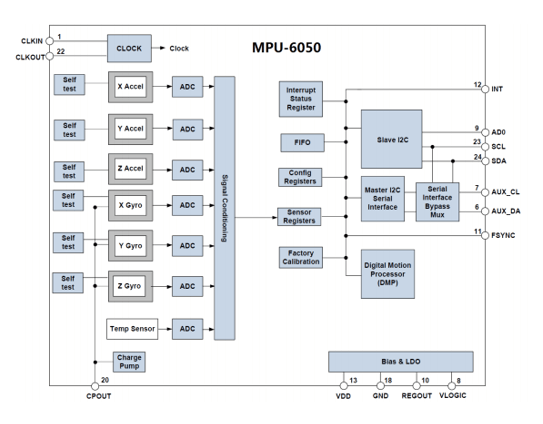
તેમાંથી, એસસીએલ અને એસડીએ એમસીયુ સાથે જોડાયેલા આઇઆઇસી ઇન્ટરફેસો છે, અને એમસીયુ આ આઈઆઈસી ઇન્ટરફેસ દ્વારા એમપીયુ -6050 ને નિયંત્રિત કરે છે.ત્યાં એક આઈઆઈસી ઇન્ટરફેસ પણ છે, એટલે કે ux ક્સ_સીએલ અને ux ક્સ_ડા.આ ઇન્ટરફેસનો ઉપયોગ બાહ્ય ગુલામ ઉપકરણોને કનેક્ટ કરવા માટે થઈ શકે છે, જેમ કે મેગ્નેટિક સેન્સર, નવ-અક્ષ સેન્સર બનાવવા માટે.વ્લોજિક એ આઇઓ પોર્ટ વોલ્ટેજ છે.આ પિન ઓછામાં ઓછા 1.8V ને ટેકો આપી શકે છે.અમે સામાન્ય રીતે તેને સીધા વીડીડી સાથે જોશું.એડી 0 એ ગુલામ આઈઆઈસી ઇન્ટરફેસ (એમસીયુ સાથે જોડાયેલ) નું સરનામાં નિયંત્રણ પિન છે.આ પિન IIC સરનામાંના સૌથી નીચાને નિયંત્રિત કરે છે.જો તે જી.એન.ડી. સાથે જોડાયેલ છે, તો એમપીયુ -6050 નું IIC સરનામું 0x68 છે;જો તે વીડીડી સાથે જોડાયેલ છે, તો તે 0x69 છે.મહેરબાની કરીને નોંધ કરો કે અહીં સરનામાંમાં ડેટા ટ્રાન્સમિશનનો સૌથી ઓછો સમાવેશ થતો નથી (સૌથી નીચો બીટ વાંચવા અને લખવા માટે રજૂઆત કરવા માટે વપરાય છે).MWBALANSESTC15 પર, AD0 GND સાથે જોડાયેલ છે, તેથી MPU-6050 નું IIC સરનામું 0x68 છે (સૌથી નીચા બીટને બાદ કરતાં).
IIC ઇન્ટરફેસ પ્રારંભ કરો
MPU-6050 STC15 સાથે વાતચીત કરવા માટે IIC નો ઉપયોગ કરે છે, તેથી આપણે પ્રથમ MPU-6050 સાથે જોડાયેલ SDA અને SCL ડેટા લાઇનો પ્રારંભ કરવાની જરૂર છે.
એમપીયુ -6050 ને ફરીથી સેટ કરો
આ પગલું એમપીયુ -6050 ની અંદરના તમામ રજિસ્ટરને તેમના ડિફ default લ્ટ મૂલ્યોમાં પુન ores સ્થાપિત કરે છે, જે પાવર મેનેજમેન્ટ રજિસ્ટર 1 (0x6 બી) ના 1 થી બીટ 7 લખીને પ્રાપ્ત થાય છે.ફરીથી સેટ કર્યા પછી, પાવર મેનેજમેન્ટ રજિસ્ટર 1 ને ડિફ default લ્ટ મૂલ્ય (0x40) માં પુન restored સ્થાપિત કરવામાં આવશે, અને આ રજિસ્ટરને પછીથી એમપીયુ -6050 ને જાગૃત કરવા અને તેને સામાન્ય કાર્યકારી સ્થિતિમાં મૂકવા માટે 0x00 પર સેટ કરવું આવશ્યક છે.
કોણીય વેગ સેન્સર (ગાયરો) અને પ્રવેગક સેન્સરની પૂર્ણ-પાયે શ્રેણી સેટ કરો
આ પગલામાં, અમે અનુક્રમે ગિરોસ્કોપ કન્ફિગરેશન રજિસ્ટર (0x1 બી) અને એક્સિલરેશન સેન્સર કન્ફિગરેશન રજિસ્ટર (0x1 સી) દ્વારા બે સેન્સર્સની પૂર્ણ-સ્કેલ રેન્જ (એફએસઆર) સેટ કરી છે.લાક્ષણિક રીતે, અમે જીરોસ્કોપની પૂર્ણ-સ્કેલ શ્રેણીને ± 2000 ડીપીએસ અને એક્સેલરોમીટરની પૂર્ણ-સ્કેલ રેન્જને ± 2 જી પર સેટ કરી.
અન્ય પરિમાણો સેટ કરો
અહીં, આપણે નીચેના પરિમાણોને પણ ગોઠવવાની જરૂર છે: વિક્ષેપો બંધ કરો, x ક્સ આઇ 2 સી ઇન્ટરફેસને અક્ષમ કરો, FIFO ને અક્ષમ કરો, ગાયરોસ્કોપ નમૂના દર સેટ કરો અને ડિજિટલ લો-પાસ ફિલ્ટર (ડીએલપીએફ) ને ગોઠવો.અમે આ પ્રકરણમાં ડેટા વાંચવા માટે વિક્ષેપોનો ઉપયોગ કરતા નથી, તેથી વિક્ષેપ કાર્યને બંધ કરવાની જરૂર છે.તે જ સમયે, અમે અન્ય બાહ્ય સેન્સર્સને કનેક્ટ કરવા માટે ux ક્સ આઇ 2 સી ઇન્ટરફેસનો ઉપયોગ કરી રહ્યાં નથી, તેથી આપણે આ ઇન્ટરફેસને પણ બંધ કરવાની જરૂર છે.આ કાર્યોને વિક્ષેપ સક્ષમ રજિસ્ટર (0x38) અને વપરાશકર્તા નિયંત્રણ રજિસ્ટર (0x6a) દ્વારા નિયંત્રિત કરી શકાય છે.MPU-6050 સેન્સર ડેટા સ્ટોર કરવા માટે FIFO નો ઉપયોગ કરી શકે છે, પરંતુ અમે તેનો ઉપયોગ આ પ્રકરણમાં કર્યો નથી, તેથી બધી FIFO ચેનલોને બંધ કરવાની જરૂર છે.આ FIFO સક્ષમ રજિસ્ટર (0x23) દ્વારા નિયંત્રિત કરી શકાય છે.ડિફ default લ્ટ રૂપે, આ રજિસ્ટરનું મૂલ્ય 0 છે (એટલે કે, FIFO અક્ષમ છે), તેથી અમે સીધા જ ડિફ default લ્ટ મૂલ્યનો ઉપયોગ કરી શકીએ છીએ.ગાયરોસ્કોપનો નમૂના દર નમૂના દર વિભાજક રજિસ્ટર (0x19) દ્વારા નિયંત્રિત થાય છે.સામાન્ય રીતે, અમે આ નમૂના દરને 50 પર સેટ કરીએ છીએ. ડિજિટલ લો-પાસ ફિલ્ટર (ડીએલપીએફ) નું ગોઠવણી કન્ફિગરેશન રજિસ્ટર (0x1 એ) દ્વારા પૂર્ણ થયું છે.સામાન્ય રીતે કહીએ તો, અમે ડેટાની ચોકસાઈ અને પ્રતિભાવ ગતિને સંતુલિત કરવા માટે ડીએલપીએફને અડધા બેન્ડવિડ્થ પર સેટ કરીશું.
સિસ્ટમ ઘડિયાળ સ્રોતને ગોઠવો અને કોણીય વેગ સેન્સર અને પ્રવેગક સેન્સરને સક્ષમ કરો
સિસ્ટમ ઘડિયાળ સ્રોતની ગોઠવણી પાવર મેનેજમેન્ટ રજિસ્ટર 1 (0x6 બી) પર આધારિત છે, જ્યાં આ રજિસ્ટરના સૌથી ઓછા ત્રણ બિટ્સ ઘડિયાળ સ્રોતની પસંદગી નક્કી કરે છે.ડિફ default લ્ટ રૂપે, આ ત્રણ બિટ્સ 0 પર સેટ છે, જેનો અર્થ છે કે સિસ્ટમ ઘડિયાળના સ્ત્રોત તરીકે આંતરિક 8 મેગાહર્ટઝ આરસી ઓસિલેટરનો ઉપયોગ કરે છે.જો કે, ઘડિયાળની ચોકસાઈ સુધારવા માટે, અમે તેને ઘણીવાર 1 પર સેટ કરીએ છીએ અને ઘડિયાળના સ્ત્રોત તરીકે એક્સ-અક્ષ ગાયરોસ્કોપ પીએલએલને પસંદ કરીએ છીએ.આ ઉપરાંત, કોણીય વેગ સેન્સર અને પ્રવેગક સેન્સરને સક્ષમ કરવું એ પ્રારંભિક પ્રક્રિયામાં પણ એક મહત્વપૂર્ણ પગલું છે.બંને કામગીરી પાવર મેનેજમેન્ટ રજિસ્ટર 2 (0x6 સી) દ્વારા લાગુ કરવામાં આવે છે.અનુરૂપ સેન્સરને સક્રિય કરવા માટે ફક્ત અનુરૂપ બીટને 0 પર સેટ કરો.ઉપરોક્ત પગલાં પૂર્ણ કર્યા પછી, એમપીયુ -6050 સામાન્ય કાર્યકારી સ્થિતિ દાખલ કરી શકે છે.તે રજિસ્ટર કે જે ખાસ સેટ નથી તે સિસ્ટમ દ્વારા ડિફ default લ્ટ મૂલ્યો પ્રીસેટ અપનાવશે.
MPU-6050 કેવી રીતે કાર્ય કરે છે?
Gંચી સેન્સર
સેન્સર અંદર એક ગાયરોથી સજ્જ છે, જે જીરોસ્કોપિક અસરને કારણે હંમેશાં પ્રારંભિક દિશાની સમાંતર રહેશે.તેથી, અમે પ્રારંભિક દિશામાંથી ગાયરોના વિચલનને શોધીને પરિભ્રમણની દિશા અને કોણની ગણતરી કરી શકીએ છીએ.
પ્રવેગometerર સેન્સર
એક્સેલરોમીટર સેન્સર એ એક ઉપકરણ છે જે પ્રવેગકને માપી શકે છે અને તે પાઇઝોઇલેક્ટ્રિક અસરના સિદ્ધાંતના આધારે કાર્ય કરે છે.પ્રવેગક દરમિયાન, સેન્સર માસ બ્લોક પર લાગુ થતી અંતર્ગત બળને માપે છે અને પછી ન્યુટનના બીજા કાયદાનો ઉપયોગ કરીને પ્રવેગક મૂલ્યની ગણતરી કરે છે.
ડિજિટલ મોશન પ્રોસેસર (ડીએમપી)
ડીએમપી એ એમપીયુ 6050 ચિપમાં ડેટા પ્રોસેસિંગ મોડ્યુલ છે જેમાં જીરોસ્કોપ અને એક્સેલરોમીટર સેન્સરમાંથી ડેટા પ્રાપ્ત કરવા અને આઉટપુટ ક્વાર્ટરન્સની પ્રક્રિયા કરવા માટે બિલ્ટ-ઇન કાલમેન ફિલ્ટરિંગ અલ્ગોરિધમનો છે.આ સુવિધા પેરિફેરલ માઇક્રોપ્રોસેસરના વર્કલોડને મોટા પ્રમાણમાં ઘટાડે છે અને કંટાળાજનક ફિલ્ટરિંગ અને ડેટા ફ્યુઝન પ્રક્રિયાને ટાળે છે.
નોંધો:
ચતુર્ભુજ: ચતુર્ભુજ સરળ સુપરકોપ્લેક્સ નંબરો છે.જટિલ સંખ્યાઓ વાસ્તવિક સંખ્યાઓ વત્તા કાલ્પનિક એકમ I થી બનેલી છે, જ્યાં i^2 = -1.
MPU-6050 નો ઉપયોગ ક્યાં છે?
- રમકડાં
- હેન્ડસેટ અને પોર્ટેબલ ગેમિંગ
- ગતિ આધારિત રમત નિયંત્રકો
- બ્લરફ્રી ™ ટેકનોલોજી (વિડિઓ/હજી પણ છબી સ્થિરતા માટે)
- એરસાઇન ™ ટેકનોલોજી (સુરક્ષા/પ્રમાણીકરણ માટે)
- ઇન્સ્ટન્ટસ્ટેસ્ટ ™ આઇજી ™ હાવભાવ માન્યતા
- આરોગ્ય, માવજત અને રમતો માટે પહેરવા યોગ્ય સેન્સર
- ગતિ-સક્ષમ રમત અને એપ્લિકેશન માળખું
- મોશનકોમંડ ™ ટેકનોલોજી (હાવભાવના ટૂંકા કાપ માટે)
- સ્થાન આધારિત સેવાઓ, રસના મુદ્દાઓ અને ડેડ રેકનીંગ
- ઇન્ટરનેટ કનેક્ટેડ ડીટીવી માટે 3 ડી રિમોટ કંટ્રોલ અને ટોપ બ boxes ક્સ, 3 ડી ઉંદર સેટ કરો
- ટચની ક્યાંક ™ ટેકનોલોજી ("કોઈ સ્પર્શ નહીં" UI એપ્લિકેશન નિયંત્રણ/સંશોધક માટે)
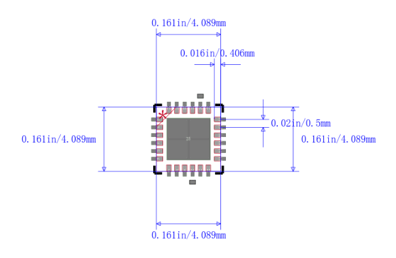
એમપીયુ -6050 નું પેકેજ
MPU-6050 નો અવાજ કેવી રીતે ઘટાડવો?
અમે એમપીયુ -6050 ના અવાજને ઘટાડવા માટે નીચેની રીતો લઈ શકીએ છીએ.
કેલિબ્રેટેડ સેન્સરનો ઉપયોગ કરો
એમપીયુ -6050 ના એક્સેલરોમીટર અને ગાયરોસ્કોપને કેલિબ્રેટ કરવાથી સેન્સર્સના પૂર્વગ્રહ અને ભૂલને દૂર કરી શકાય છે, આમ અવાજની અસરને ઘટાડે છે.કેલિબ્રેશન પ્રક્રિયામાં સામાન્ય રીતે બે તબક્કાઓ હોય છે: સ્થિર કેલિબ્રેશન અને ગતિ કેલિબ્રેશન.
હાર્ડવેર ફિલ્ટરિંગ પ્રક્રિયા
એમપીયુ -6050 ની પાવર લાઇનમાં ફિલ્ટર કેપેસિટર્સ ઉમેરવાથી સેન્સર પર વીજ પુરવઠો અવાજની અસર ઓછી થઈ શકે છે.દરમિયાન, પીસીબી લેઆઉટ દરમિયાન, આપણે એમપીયુ -6050 ને દખલના સંભવિત સ્ત્રોતોથી દૂર રાખવાનો પ્રયાસ કરવો જોઈએ, જેમ કે ઉચ્ચ-આવર્તન સિગ્નલ લાઇનો અને ઉચ્ચ-પાવર ઘટકો.
સ Software ફ્ટવેર ફિલ્ટરિંગ પ્રક્રિયા
એમપીયુ -6050 માંથી કાચો ડેટા એકત્રિત કર્યા પછી, અમે અવાજ-પ્રેરિત દખલને દૂર કરવા માટે પ્રારંભિક ડેટાની પૂર્વ-પ્રક્રિયા માટે સ software ફ્ટવેર ફિલ્ટરિંગ લિંક ઉમેરી શકીએ છીએ.સામાન્ય રીતે ઉપયોગમાં લેવામાં આવતી સ software ફ્ટવેર ફિલ્ટરિંગ પદ્ધતિઓમાં સરેરાશ ફિલ્ટરિંગ, મેડિયન ફિલ્ટરિંગ, કાલમેન ફિલ્ટરિંગ અને તેથી વધુ શામેલ છે.
આંતરિક લો-પાસ ફિલ્ટરનો ઉપયોગ કરો
એમપીયુ -6050 માં આંતરિક ઇન્ટિગ્રેટેડ ડિજિટલ લો-પાસ ફિલ્ટર છે, જેનો ઉપયોગ તેની કટઓફ આવર્તન સેટ કરીને ઉચ્ચ-આવર્તન અવાજને ઘટાડવા માટે થઈ શકે છે.ખાસ કરીને, અમે એ/ડી નમૂના દ્વારા થતાં ઉચ્ચ-આવર્તન અવાજને દૂર કરવા માટે એમપીયુ -6050 ના રૂપરેખા રજિસ્ટરમાં ફેરફાર કરીને ડિજિટલ ફિલ્ટરની કટઓફ આવર્તન સેટ કરી શકીએ છીએ.
એમપીયુ -6050-આધારિત ગતિ માર્ગ ગણતરી
એમપીયુ -6050 એ છ-અક્ષ એક્સેલેરોમીટર અને ગાયરોસ્કોપ સેન્સર છે જેનો ઉપયોગ objects બ્જેક્ટ્સની ગતિ અને વલણને માપવા માટે થઈ શકે છે.એમપીયુ -6050 પર આધારિત ગતિ માર્ગની ગણતરી નીચેના પગલાં દ્વારા અનુભવી શકાય છે:
પ્રથમ પગલું સેન્સર ડેટા વાંચવાનું છે.અમને યોગ્ય ડ્રાઇવરો અને લાઇબ્રેરી કાર્યોનો ઉપયોગ કરીને એમપીયુ -6050 સેન્સરમાંથી એક્સેલરોમીટર અને ગાયરોસ્કોપ ડેટા વાંચવાની જરૂર છે.આ ડેટા સામાન્ય રીતે ડિજિટલ ફોર્મેટમાં આઉટપુટ હોય છે, તેથી તેમને ભૌતિક એકમોમાં વાસ્તવિક માપમાં રૂપાંતરિત કરવા માટે કેટલાક રૂપાંતર અને કેલિબ્રેશન કાર્ય જરૂરી છે.
બીજું પગલું પ્રવેગકની ગણતરી કરવાનું છે.પ્રથમ, આપણે દરેક અક્ષમાં of બ્જેક્ટના પ્રવેગક મેળવવા માટે એક્સેલરોમીટરમાંથી ડેટા પર પ્રક્રિયા કરવાની જરૂર છે.ત્યારબાદ, દરેક અક્ષમાં object બ્જેક્ટના વેગ અને વિસ્થાપનની ગણતરી કરવા માટે, આપણે પ્રવેગક ડેટાને એકીકૃત કરવાની જરૂર છે.Ule લરની પદ્ધતિ અથવા લંગર-કુત્તા પદ્ધતિ જેવી આંકડાકીય એકીકરણ તકનીકો, ડિસ્પ્લેસમેન્ટ ગણતરીઓની ચોકસાઈને સુનિશ્ચિત કરવા માટે આ પ્રક્રિયામાં ઘણીવાર ઉપયોગમાં લેવાય છે.
ત્રીજું પગલું એ કોણીય વેગની ગણતરી કરવાનું છે.ગાયરોસ્કોપ ડેટાનો ઉપયોગ કરીને, દરેક અક્ષમાં object બ્જેક્ટની કોણીય વેગની ગણતરી કરી શકાય છે.ફરીથી, વાસ્તવિક ભૌતિક એકમોમાં કોણીય વેગ મેળવવા માટે આ ડેટાને કેલિબ્રેટ કરવાની અને રૂપાંતરિત કરવાની જરૂર છે.
ચોથું પગલું પરિભ્રમણની ગણતરી કરવાનું છે.કોણીય વેગ ડેટાને એકીકૃત કરીને, દરેક અક્ષમાં of બ્જેક્ટના પરિભ્રમણના કોણની ગણતરી કરી શકાય છે.આ કોણની ગણતરી કરવા માટે ule લરની પદ્ધતિ અથવા લોન્ગ-કુત્તા પદ્ધતિ જેવી આંકડાકીય એકીકરણ તકનીકોનો ઉપયોગ કરીને કરી શકાય છે.
પાંચમું પગલું ડેટાને મર્જ કરવાનું છે.Object બ્જેક્ટની સંપૂર્ણ વલણ અને સ્થિતિની માહિતી મેળવવા માટે અમે એક્સેલેરોમીટર અને ગાયરોસ્કોપ્સના ડેટાને જોડીએ છીએ.આ ક્વાર્ટરિયન-આધારિત એટીટ્યુડ સોલ્વર અથવા ule લર એંગલ સોલ્વર જેવા અલ્ગોરિધમ્સનો ઉપયોગ કરીને કરી શકાય છે.
છઠ્ઠું પગલું પરિણામોની કલ્પના કરવાનું છે.અમે 3 ડી કોઓર્ડિનેટ સિસ્ટમના પોઇન્ટ્સના સમૂહમાં ગણતરી કરેલ object બ્જેક્ટ ગતિ માર્ગને રૂપાંતરિત કરીએ છીએ અને the બ્જેક્ટના ગતિ માર્ગ અને વલણના ફેરફારોની વધુ સાહજિક સમજ માટે યોગ્ય વિઝ્યુલાઇઝેશન ટૂલ્સનો ઉપયોગ કરીને તેને પ્રદર્શિત કરીએ છીએ.
વારંવાર પૂછાતા પ્રશ્નો [FAQ]
1. એમપીયુ 6050 કેટલું સચોટ છે?
હસ્તગત કરેલા પરિણામોએ એલિવેટર શાફ્ટના યોગ્ય પરિમાણ અને લિફ્ટ ઉદ્યોગના ઉચ્ચ ધોરણોની ખાતરી આપીને, 1 % કરતા ઓછી અને વિશ્વસનીયતાની પૂરતી ચોકસાઈ દર્શાવી.
2. MPU6050 માંથી ડેટા કેવી રીતે વાંચવો?
આંતરિક એમપીયુ 6050 રજિસ્ટરને વાંચવા માટે, માસ્ટર એક શરૂઆતની સ્થિતિ મોકલે છે, ત્યારબાદ આઇ 2 સી ગુલામ સરનામું અને લેખન બીટ, અને પછી રજિસ્ટર સરનામું જે વાંચવામાં આવશે.
3. MPU6050 નો ઉપયોગ ક્યાં છે?
વેરેબલ હેલ્થ-ટ્રેકિંગમાં, ફિટનેસ-ટ્રેકિંગ ડિવાઇસીસ.ડ્રોન અને ક્વાડકોપ્ટરમાં, એમપીયુ 6050 નો ઉપયોગ પોઝિશન કંટ્રોલ માટે થાય છે.રોબોટિક હાથને નિયંત્રિત કરવા માટે વપરાય છે.હાથ હાવભાવ નિયંત્રણ ઉપકરણો.
4. શું MPU6050 એક IMU છે?
એમપીયુ 6050 આઇએમયુ સેન્સર બ્લોક એમપીયુ -6050 સેન્સરમાંથી ડેટા વાંચે છે જે હાર્ડવેરથી જોડાયેલ છે.બ્લોક સેન્સરની અક્ષો સાથે પ્રવેગક, કોણીય દર અને તાપમાનને આઉટપુટ કરે છે.
5. એમપીયુ 6050 ની પ્રક્રિયા શું છે?
આ એમપીયુ 6050 નો board નબોર્ડ પ્રોસેસર છે જે એક્સેલરોમીટર અને ગાયરોસ્કોપમાંથી આવતા ડેટાને જોડે છે.ડીએમપી એમપીયુ 6050 નો ઉપયોગ કરવાની ચાવી છે અને પછીથી વિગતવાર સમજાવાયેલ છે.બધા માઇક્રોપ્રોસેસર્સની જેમ ડીએમપીને ચલાવવા માટે ફર્મવેરની જરૂર છે.
કાર્ય પરીક્ષણ.સૌથી વધુ ખર્ચ-અસરકારક ઉત્પાદનો અને શ્રેષ્ઠ સેવા અમારી શાશ્વત પ્રતિબદ્ધતા છે.
ભારે વસ્તુ
- સીઆર 2032 અને સીઆર 2016 વિનિમયક્ષમ છે
- મોસ્ફેટ: વ્યાખ્યા, કાર્યકારી સિદ્ધાંત અને પસંદગી
- રિલે ઇન્સ્ટોલેશન અને પરીક્ષણ, રિલે વાયરિંગ આકૃતિઓનું અર્થઘટન
- સીઆર 2016 વિ સીઆર 2032 શું તફાવત છે
- એનપીએન વિ પી.એન.પી.: શું તફાવત છે?
- ESP32 વિ STM32: તમારા માટે કયા માઇક્રોકન્ટ્રોલર વધુ સારા છે?
- એલએમ 358 ડ્યુઅલ ઓપરેશનલ એમ્પ્લીફાયર વ્યાપક માર્ગદર્શિકા: પિનઆઉટ્સ, સર્કિટ આકૃતિઓ, સમકક્ષ, ઉપયોગી ઉદાહરણો
- સીઆર 2032 વિ ડીએલ 2032 વિ સીઆર 2025 સરખામણી માર્ગદર્શિકા
- ESP32 અને ESP32-S3 તકનીકી અને પ્રભાવ વિશ્લેષણને તફાવતોને સમજવું
- આરસી સિરીઝ સર્કિટનું વિગતવાર વિશ્લેષણ
 NRF24L01 કમ્યુનિકેશન ચિપની ક્ષમતાઓ અને એપ્લિકેશનોની શોધખોળ
NRF24L01 કમ્યુનિકેશન ચિપની ક્ષમતાઓ અને એપ્લિકેશનોની શોધખોળ
2024-04-25
 એમએમબીટી 3904 એનપીએન ટ્રાંઝિસ્ટર: તેની વિશિષ્ટતાઓ, વ્યાપક એપ્લિકેશન માર્ગદર્શિકા અને એમએમબીટી 3904 વિ. એમએમબીટી 5551
એમએમબીટી 3904 એનપીએન ટ્રાંઝિસ્ટર: તેની વિશિષ્ટતાઓ, વ્યાપક એપ્લિકેશન માર્ગદર્શિકા અને એમએમબીટી 3904 વિ. એમએમબીટી 5551
2024-04-25
હોટ ભાગ નંબર
 CL03C5R6BA3GNND
CL03C5R6BA3GNND 0603YC393KAT4A
0603YC393KAT4A 12063A682KAT2A
12063A682KAT2A LD05YC474JAB2A
LD05YC474JAB2A CY7C4285V-10ASXC
CY7C4285V-10ASXC RC0603JR-072KL
RC0603JR-072KL MAX549AEUA
MAX549AEUA EP1S20F780C7N
EP1S20F780C7N HIN202ECBZ-T
HIN202ECBZ-T DS1232+
DS1232+
- ALM-11136-BLKG
- IHLP2525BDER4R7M01
- VI-232-03
- MC33204DTBR2G
- TLC2543IDBRQ1
- LTC3589IUJ#PBF
- IRM-30-24
- T495B107M010ZTE700
- MC74HC125AFEL
- T491D475K035AT4153
- SB05W05C-TB-E
- AM186EM-33KC
- AP1121BSLA
- CMD810C1732/1827P45A
- GNS7560ET1UM
- HA1-2420/883
- IDT71502L25J
- LTC1594IS#TR
- LV23014T-A-TLM-E
- MP656UCG
- MP7670AS
- NT5CB128M16FP-EK
- PC87312VF
- S38GC031P101R2
- S80C196NP
- SA2007PSA
- TPS79850QDGNR
- UPA2350T1G-E4-A
- W24257S-70LE
- 90CH44F-6347
- K5A3240YTC-T755
- MGCM01KG
- MX26LV400BWC
- S6TNMR1X01-Y040
- SE3010BQ
- XC4005-5PC84I0090
- TMDS442PNPRG4
- YMU798P-W
- MBM29DL323BD-90PBT-FJ